Table of Contents
literals :字面量,由语法表达式定义的常量,或由一组定义好的字词组成点语句表达式定义的常量
PDDL (Planning domain definition language ,规划域定义语言)
是一种尝试用来规范 AI规划 的语言 ,与1998年开发。是一种一阶语言(first-order language) L 语言,其定义了我们如何使用有限的单词和符号来形成复杂的,类似句子的实体。它把规划问题的模型分为两个主要部分:领域描述(domain description) 和 问题描述(problem description)
领域描述
- 域名定义
- 需求定义
- 对象类型层次结构定义(与OOP中的类层次结构类似)
- 常量对象点定义
- 谓词的定义
- 可能采取的动作(action)的定义
- 带有参数的Operator方案,会在执行过程中实例化
- 动作具有参数(可以是对象实例化的变量),前提条件和效果。效果也可以具有应用条件
问题的描述
- 问题名称的定义
- 相关域名的定义
- 所有可能对象的定义
- 初始条件的定义
- 目标状态的定义
PDDL语法:
- 首个单词是谓词,用来修饰后面的对象的关系
- 变量以
?开头-之后跟随的是变量的类型;后的是注释说明- 每条关系的声明中的变量都是互不干扰的,都是局部变量,仅在本条声明中有效
本文使用的例子是码头工作机器人(dock-worker-robot),后面简称为 DWR 的例子
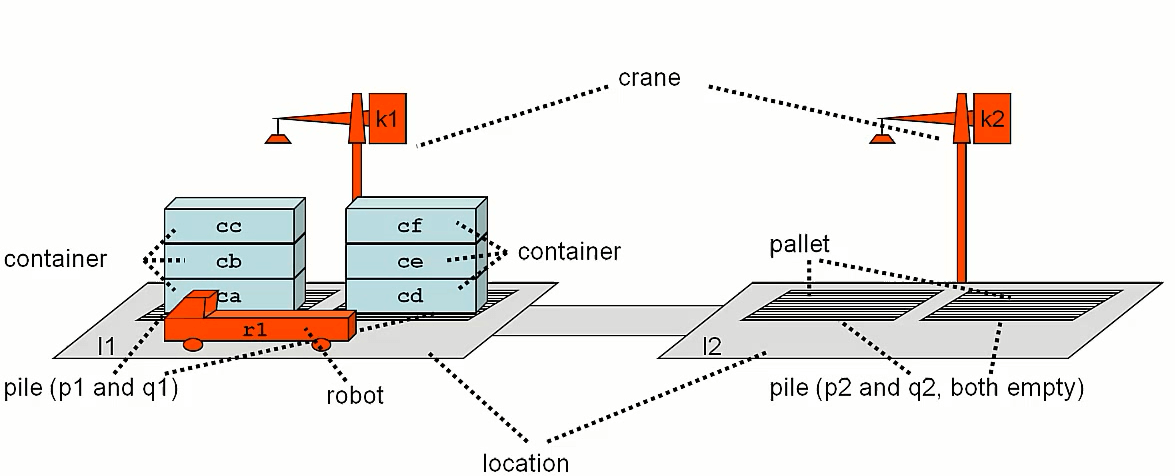
对象类型的定义
在DWR点定义域中,我们拥有以下几种类型的对象 我们使用不同的字符来标记这些对象,如robot1,robot2, 分析场景中的对象
- robots {robot1,robot2,… }
- 集装箱搬运者
- 可以在邻近的两个地点间移动
- crane {crane1,crane2,… }
- 起重机,只能固定在某个地点
- 可以吊起搬运者或桩子上的集装箱
- 可以把集装箱放在搬运者或桩子上
- containers {cont1,cont2,… }
- 集装箱,放置在桩子上
- 可以被搬运者搬运
- 可以被起重机吊起
- locations {loc1,loc2,… }
- 表示地点位置
- piles {p1,p2,… }
- 桩子,属于某个地点
- 可以放置托盘
- pallet
- 可以承载集装箱
然后我们可以用PDDL表示这些类型
(define(domain DWR) ;告诉系统开始定义,定义的东西是 domain,名称为DWR
(:requirement :strips :typing) ;此特定领域的需要strips和typing这两个扩展
(:types
location ;可以拥有多个不同的地点
pile ;附属在地点之上的桩子
robot ;最多可以装载一个集装箱,每个地点只能有一个搬运者
crane ;属于某个地点,用来吊起和放下集装箱
container ;集装箱
)
...
)
关系的表示
我们使用谓语动词来联系两个对象,因此,我们需要定义一些关系用来联系对象彼此。关系也被称为给定世界中的谓词(predicates),用来陈述几个对象间的关系是持有还是不持有,是正还是假。
(:predicates
;前三条什么是静态的,即不会改变他们的关系
(adjacent ?l1 ?l2 - location) ;location ?l1 is adjacent to ?l2
(attached ?p - pile ?l - location) ;pile ?p is attached to location ?l
(belong ?k - crane ?l - location) ;crane ?k belongs to location ?l
;下面四条是关系动态的
(at ?r - robot ?l - location) ;robot ?r is at location ?l
(occupied ?l - location) ;there is a robot at location ?l
(loaded ?r - robot ?c - container) ;robot ?r is loaded with container >c
(unloaded ?r - robot) ;robot ?r is empty
;这两个关系是相互关联的,即起重机为空时,它就不是握着集装箱;反之亦然,如果它握着集装箱,则它不可能为空
(holding ?k - crane ?c - container) ;crane ?k is holding a container ?c
(empty ?k - crane) ;crane ?k is empty
(in ?c - container ?p - pile) ;container ?c is within pile ?p
(top ?c - container ?p - pile) ;container ?c is on the top of pile ?p
(on ?c1 - container ?c2 - container);container ?c1 is on container ?c2
)
状态的表示
原子:一个谓语加上适当数量的对象构成一个原子 状态:是一组原子(atom)集合的实例对象(即具备实际意义,某个时刻,世界中对象间的关系)
- 是一个封闭世界,只有在状态的声明中提到的关系才成立,其他的一律不成立
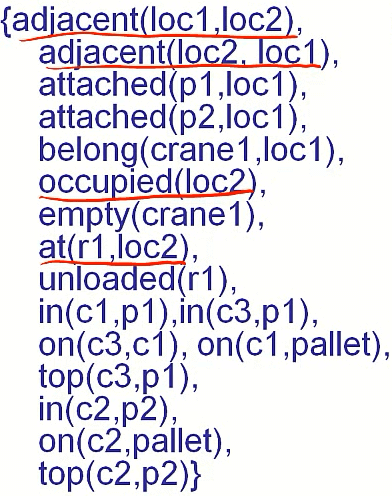
如图,可以把该状态描述如下:
state = {
adjacent(loc1,loc2),adjacent(loc2,loc1),
attached(p1,loc1),attached(p2,loc1),
belong(crane1,loc1),
at(r1,loc2),
occupied(loc2),
empty(crane1),
in(c1,p1),in(c3,p1),
on(c3,c1),on(c1,pallet),
top(c3,p1),
in(c2,p2),
on(c2,pallet),
top(c2,p2)
}
at(r1,loc1)是正确的吗? ——答案是,错误的,因为不在state的描述当中。 以上就是state的表示
操作(Operator)的表示
操作提供状态过渡的状态高度系统,在规划定义域中,它由一个三元组组成,即
o = (name(o), precond(o),effects(o))
- 表示此操作的唯一名称,不能和其他名称重命名,并且包含一系列参数,在执行操作时需要用到的变量
- precond(o) 表示 前提条件
- effects(o) 表示 作用效果
- precon(o) 和 effects(o) 都是一组字面量集合
行为则是一个定义域中的某个操作的实例,当然,在规划时可以有许多同一个操作的行为同时存在。
move(r,l,main)
- precond:adjacent(l,m),at(r,l),¬occupied(m)
- effects: at(r,m),occupied(m),¬occupied(l),¬at(r,l)
load(k,l,c,r)
- precond: belong(k,l),holding(k,c),at(r,l),unloaded(r)
- effects: empty(k),¬holding(k,c),loaded(r,c),¬unloaded(r)
put(k,l,c,d,p)
- precond:belong(k,l),attached(p,l),holding(k,c),top(d,p)
- effects: ¬holding(k,c),empty(k),in(c,p),top(c,p),on(c,d),¬top(d,p)
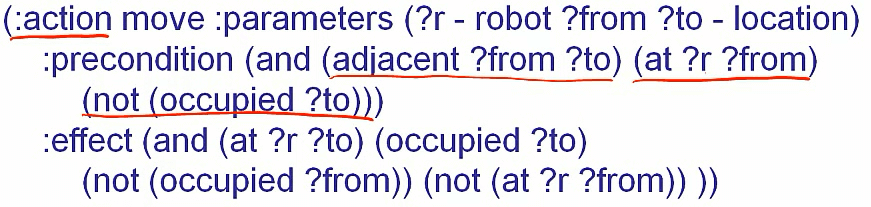
;; move a robot between two adjacent locations
(:action move
:parameters (?r - robot ?from ?to - location)
:precondition(and
(adjacent ?from ?to) (at ?r ?from) (not(occupied ?to))
)
:effect(and
(at ?r ?to) (occupied ?to) (not(occupied ?from)) (not(at ?r ?from))
)
)
从状态中找出合适的行动
假设 L 是一组字面量集合
- L+ 表示L中的所有正向字面量
- L- 表示L中的所有反向字面量
假设a是一个行为,s是一个状态,当且仅当a在s中可用时
- precon+(a) ⊆ s
- precon-(a) ∩ s = {} ;例如a 中有一个条件为 ¬occupied(m),m没有被占用,与s点交集一定为空,即s中一定没有occupied(m)这条记录。
注意:s所维护的关系记录是通过添加和删除表示的,也就是说,当s中存在某条描述时,条件为真,不存在某条描述时,条件为假。当我们通过反向字面量进行操作时,其实就是移除掉这一项,如 对occupied(m),执行效果¬occupied(m),就是将m被占用,改为m没有被占用,就没必要在新的状态中特定记录没有被占用这么一条记录,只要该状态没有该记录,就表示occupied(m)这条语句的结果为假
最后,我们把s状态中的行为a 的状态转移函数γ 定义如下
- γ(s,a) = (s - effects-(a)) ∪ effects+(a)
即,新的状态 = s 移除掉a的效果中的所有反向记录 ∪ a的效果中的所有正向记录
某个状态可能有许多行动,我们需要从中找出合适的行动 那么如何找出合适的行动呢?
function addApplicables(A,op ,precs, σ,s)
if precs+.isEmpty() then
for every np in precs- do
if s.falsifies(σ(np)) then return
A.add(σ(op))
else
pp← precs+.chooseOne()
for every sp in s do
σ' ← σ.extend(sp,pp)
if σ'.isValid() then
addApplicables(A,op,(precs - pp),σ',s)
解析该算法:
- 参数
- A是我们最终返回的可用行动集合,最初是空的
- op 是 operator,当前状态合适的操作点实例
- precs 是preconditions,该operator点前提条件
- σ 是操作所需变量的值的集合,初始时没有变量,每次匹配条件成功时增加记录
- s 当前的状态
首先处理所有的正字面量条件,所以,先用precs+.isEmpty()检测是否有正字面量的前提条件,有的话,执行else中的部分
- 首先获取下一个正字面量pp(positive precondtion)
- 遍历所有的state中的声明sp(state propositions),同时他会过滤掉其他记录,只留下谓词相同的
- 生成新的σ’ = σ.extend(sp,pp),里面存放的是前提条件的pp,和状态中的sp
- 判断σ’.isValid ,sp 是否满足 pp,谓词相同,变量相同
- 是,将pp 从precs中去掉,σ’ 作为新的 σ,继续判断剩余的条件,,直到precs为空,然后把a添加到可行行为列表中
- 另外,就是,当前提条件的正字面量为空后,开始判断所有负字面量
- 遍历precs-中的每一个 np (negative precondition)
- 检测s是否包含np这个记录,如果有,则判断失败。因为,不允许s中拥有任何负字面量的定义。(如负字面量¬occupied(m) 表示m不被占用,而s中有occupied(m),m被占用这一条记录,显然不符合条件)
- 前面的负字面量全部通过,说明该操作是合适的,因此把op加入A列表中。
- 遍历precs-中的每一个 np (negative precondition)
- σ(np) 解释,给np这条记录赋值,使其有真正意义的值,然后与s中的记录进行对比
- σ(op) 解释,把σ中所有记录应用给op的参数,使其成为实例
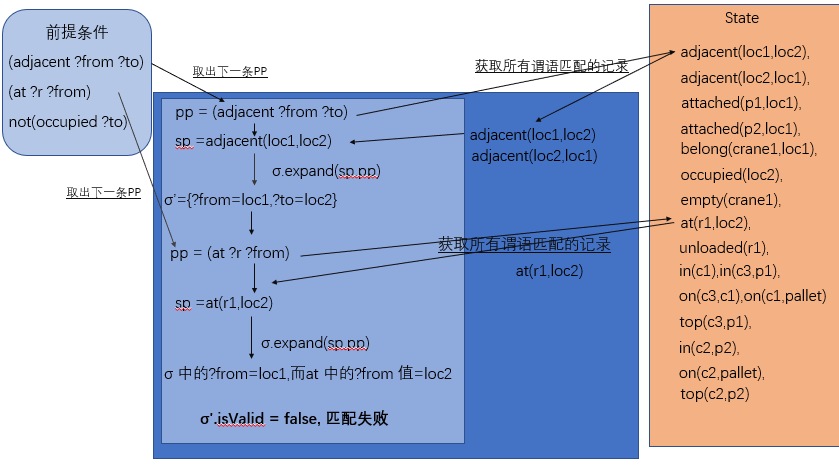
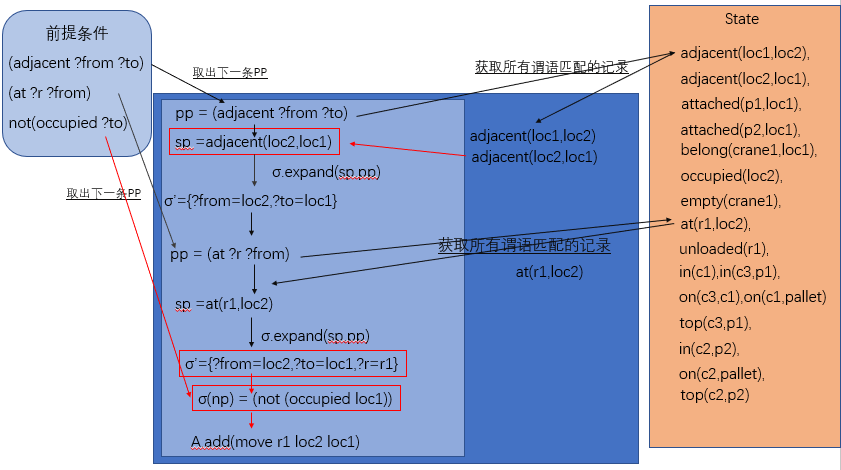
实例:
假设当前的世界状态为
 需要判断的行动为move
需要判断的行动为move
 然后就是该行动是否可用的判断过程
然后就是该行动是否可用的判断过程