

Table of Contents
PSP 算法
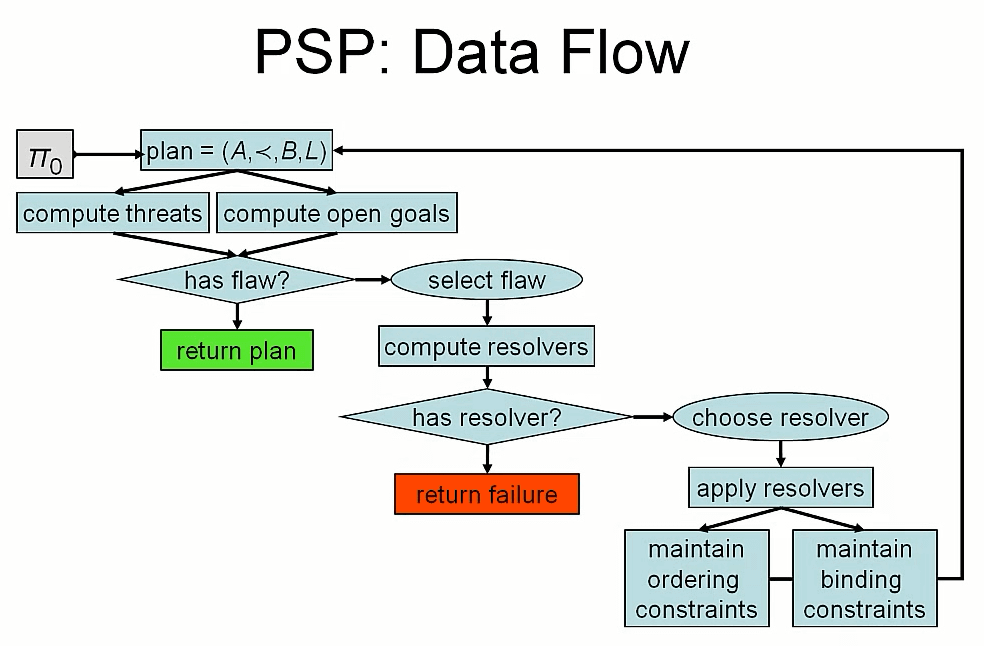
PSP :Plan-Space Planner 主要原则,在保持顺序约束和变量约束一致的情况下,不断完善局部计划,直到没有缺陷 基础操作:
- 寻找计划的缺陷,即 它的子目标和风险
- 选择一个缺陷
- 找到所有可以解决它的方式
- 选择其中一个解决方式,根据该解决方式完善计划
伪代码
function PSP(plan)
allFlaws <- plan.openGoals() + plan.threats()
if allFlaws.empty() then return plan
flaw <- allFlaws.selectOne
allResolvers <- flaw.getResolvers(plan)
if allResolvers.empty() then renturn failure
resolver <- allResolvers.chooseOne()
newPlan <- plan.refine(resolver)
return PSP(newPlan)
需要实现的是
- plan.openGoals:获取所有开放目标,即有前提条件没有被满足的目标
- plan.threats:获取所有威胁 当allFlaws为空是,证明计划已经没有缺陷,因此返回计划
- selectOne:从所有缺陷中选择其中一个
- selectOne 是确定性选择的
- selectOne 不需要回溯,在计划成为解决方案前,所有的缺陷都必须解决
- 顺序对于完整性不重要,不管我们选择先解决哪一个缺陷,都不会影响到别缺陷的解决,因为它们是分层的,而不是平行的
- 顺序对效率有所影响,如我们选择了一大堆可以解决的缺陷,最后发现了一个不可以解决的缺陷,这是不是前面的都浪费了,反过来,如果我们一开始就发现了一个不可解决的缺陷,就可以立即终止搜索。
- flaw.getResolvers:获取当前局部计划的所有解决方案,当返回空时,说明没有解决方案,返回失败
- allResolvers.chooseOne:从所有解决方案中选择其中一个
- chooseOne 是不确定性选择的,我们可以使用任意算法来实现,以支持下面的特性
- chooseOne 需要回溯,当有一个Flaw细化失败,找不到解决方案时,需要回溯,使用别的解决方案
- plan.refine:使用选择的方案来细化计划,继而得到一个新的局部计划
- 这也是在当前搜索空间生成一个新的搜索节点的步骤
PSP 实现细节
术语说明: 命题:即一组说明世界状态的表达式 前提条件:需要满足的命题 效果:产生一组命题
plan.openGoals:寻找未实现的子目标(增量的,即不需要每一次循环都全部重新计算)
- 在初始计划π0中,有两个虚拟行动 init 和 goal
- 每次添加行动到计划中时,会把该行动的所有前提条件作为未实现的子目标。因为init没有前提条件,只有goal有,所以goal的所有前提条件都会成为子目标
- 每次条件因果关系链,被保护的命题就不再是未实现的了
未完成的子目标列表会根据新添加的行动的前提条件而增加,而添加因果关系链(实现了前提条件)则会减少子目标列表
plan.threats:寻找潜在的威胁(增量的)
- 在初始计划π0中,没有如何威胁
- 每次添加行动anew 到计划 π = (A,‹,B,L)
- for every causal link < ai - [p] -> aj > ∈ L
- if (anew ‹ aj) or (aj ‹ anew ) then return
- else for every effect q of anew
- if (∃ σ:σ(p) = σ(¬p)) then q of anew threatens < ai - [p] -> aj>
- for every causal link < ai - [p] -> aj > ∈ L
- 每次添加一个新的因果关系链 < ai - [p] -> aj > 到计划π = (A,‹,B,L)时
- for every action aold ∈ A
- if (aold ‹ aj ) or (aj = aold ) or (aj ‹ aold ) then next action
else for every effect q of aold
- if (∃ σ:σ(p) = σ(¬p)) then q of aold threatens < ai - [p] -> aj>
- if (aold ‹ aj ) or (aj = aold ) or (aj ‹ aold ) then next action
else for every effect q of aold
- for every action aold ∈ A
即,每次添加新的行动或者因果关系链到计划中时,都要检查一下有没有引入威胁,引入威胁的判断是在某个因果关系之间,且恰好有对立命题
flaw.getResolvers(plan):获取解决方案
- 遍历所有 ag 中所有未实现的前提条件
- 在已存在的行动中寻找是否可以联系起来的
- for every action aold ∈ A
- if (ag = aold) or (ag ‹ aold) then next action
- else for every effect q of aold
- if (∃ σ:σ(p) = σ(p)) then adding < aold-[σ(p)]->ag> is a resolver
- for every action aold ∈ A
- 如果没有,则尝试添加新的行动和因果关系链
- for every effect q of every operator o
- if(∃ σ:σ(p) = σ(p)) then adding anew = o.newInstance() and < anew-[σ(p)]->ag> is a resolver
- for every effect q of every operator o
- 在已存在的行动中寻找是否可以联系起来的
- 遍历所有at中威胁到了因果关系链<ai-[p]->aj>的效果q
- 如果满足以下条件,放到因果关系链之前
- 即at不能是生产者(at ≠ ai) ,也不能是aj 的消费者((at ‹ ai),如果是,则没有解决方案
- 如果都不是的话 ,就可以返回 add (at ‹ ai) 作为解决该缺陷的方案(即因果关系链之前)。
- 即at不能是生产者(at ≠ ai) ,也不能是aj 的消费者((at ‹ ai),如果是,则没有解决方案
- 放到因果关系链之后
- 如果 at是生产者(at = ai),或者at要先于ai (at ‹ ai),就没办法放在因果关系链之后,即没有解决方案。
- 否则的话,就可以返回add (aj ‹ at) 作为解决该缺陷的方案(即放到因果关系链之后)。
- 如果满足以下条件,放到因果关系链之前
用下面这一张图来说明
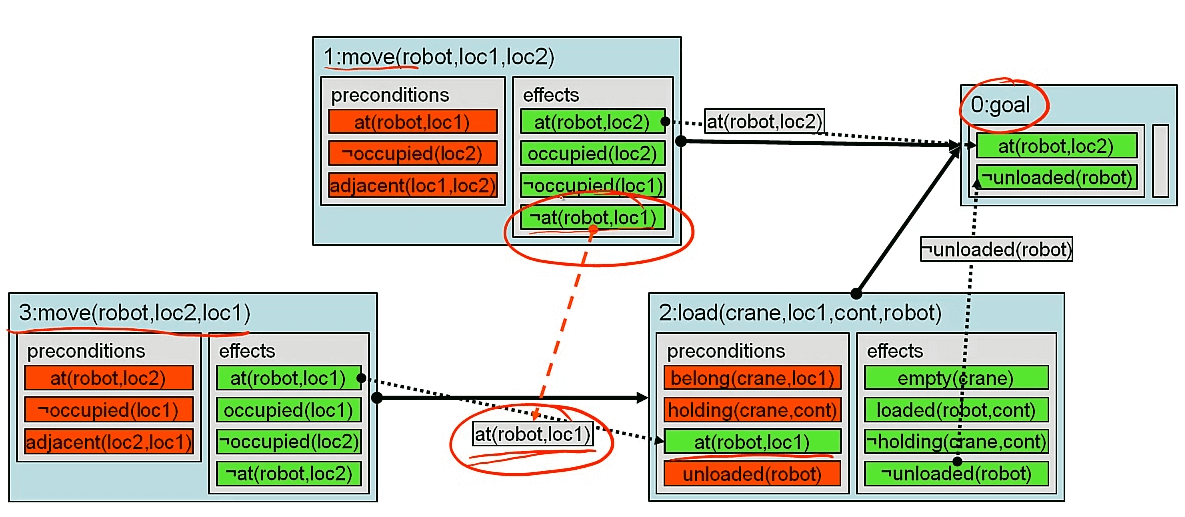 1:move,威胁到了 3:move 到 2:load这两个行动的因果关系,如果按照3,1,2,0 来执行,则会失败,因为2的前提条件不满足,被1修改了,因此,只要把1放到2之后,或者,3之前就行了。
1:move,威胁到了 3:move 到 2:load这两个行动的因果关系,如果按照3,1,2,0 来执行,则会失败,因为2的前提条件不满足,被1修改了,因此,只要把1放到2之后,或者,3之前就行了。
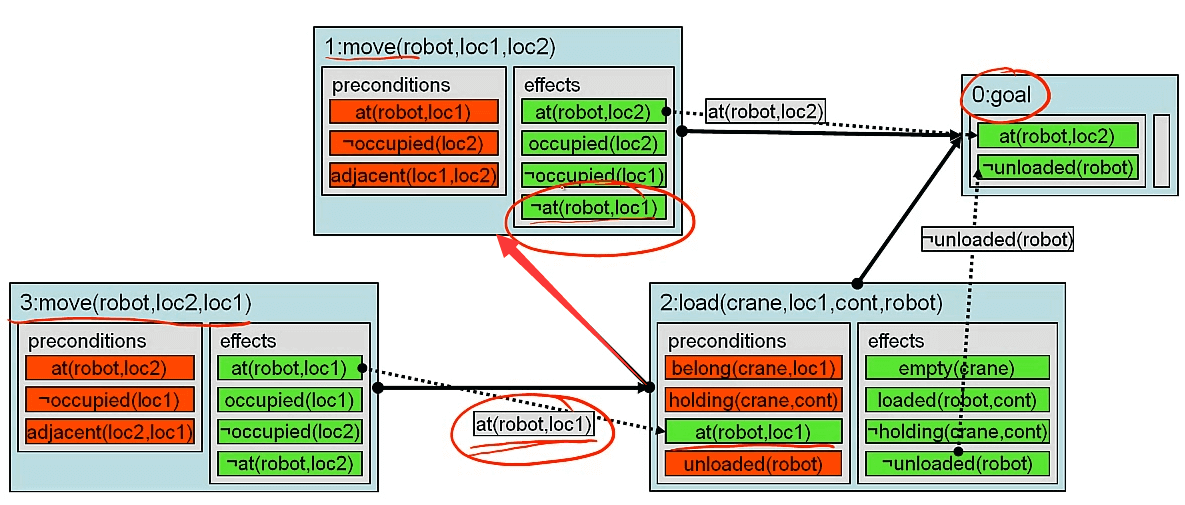 同样是at中的效果q威胁到因果关系链<ai-[p]->aj>,第三种解决方法
同样是at中的效果q威胁到因果关系链<ai-[p]->aj>,第三种解决方法
- 通过添加变量绑定,让开始时的前提条件检查失败(即约束该威胁命题变量的值,使其不能等于 某个值,来避免其修改该值)
- for every variable v in p or q
- if v ≠ σ(v) is consistent with B then
- adding v ≠ σ(v) is a resolver
- if v ≠ σ(v) is consistent with B then
- for every variable v in p or q
原文描述: the other way in which this type of flaw can be resolved is to add variable bindings, such that the unifications that we computed earlier will fail … go to every variable v that occurs in p or q ,and try to make the unification fail on that variable, so if we computed earlier our substitution of v must be a specific value σ(v) , then asserting that our variable v must not have this value is of course a potential resolver, but it is only a resolver if this is consistent with the variable bindings currently in our partial plan, if it is consistent then this is a resolver,adding this variable bindings constraint is a resolver for our flaw
目前对这个方法的描述还不是很迷糊,只记一下当前的理解 σ(v) ,该符号的描述是代入(substitution),表示取变量v的值,返回的可能是单个值,也可能是一组值。然后就是如果 v 的值不为 σ(v),则它是一个潜在的解决方案,但是,只有和当前的变量绑定一致时,它才是解决方案。这里的“一致”目前有点迷惑,到底怎么样才是一致? 假设p 为 at(robot,loc1), a3:move(r3,f3,t3)的效果为at(r3,t3), a1:move(r1,f1,t1)的效果q 为 ¬at(r1,f1), a1的效果威胁到了a3的效果, 为了避免t1影响到t3,
- for every v in at(r3,t3) or ¬at(r1,t1) //遍历两个命题中冲突的变量v
- 判断v≠ σ(v) 和 B中的一致,如果是,则添加v≠ σ(v)
- r1 ≠ robot ,不一致,因为已经定义了r1 = robot
- f1 ≠ loc1 ,一致,因为f1 在 B 中还没有定义,即还没有约束,所以有解决方案
- r3 ≠ robot ,不一致,因为已经定义了r3 = robot
- t3 ≠ loc1 ,不一致,因为已经定义了t3 = loc1 最后如果满足,添加变量绑定约束 v ≠ σ(v) (即 f1 ≠ loc1) 作为解决此威胁的解决方案。
| 变量 | = | ≠ |
|---|---|---|
| r1 | robot | |
| t1 | loc2 | |
| r3 | robot | |
| t3 | loc1 |
添加绑定变量约束后
| 变量 | = | ≠ |
|---|---|---|
| r1 | robot | |
| t1 | loc2 | |
| r3 | robot | |
| t3 | loc1 | |
| f1 | loc1 |
plan.refine(resolver):细化(改善)计划
当我们从上一步得到解决方法后,把它应用到当前的局部计划,对其进行细化,即为局部计划添加resolver中指定的元素
- 添加顺序约束
- 添加一个或多个变量绑定约束
- 添加因果关系链
- 添加新行动
然后更新缺陷
- 未实现的前提条件(see: plan.openGoals())
- 威胁(see: plan.threats())
管理顺序约束(maintain ordering constraints)
需要用到下面两个操作
- 查询 (ai ‹ aj),即ai 是否优先于 aj
- 添加 (ai ‹ aj)
可能的内部表示
- (1)为所给的每个行动维护一组前驱/后继
- 即 a0 没有前驱,后继有a1,a2,a3
- a1 的前驱有a0,后继有a2,a3
- 以此类推,这种方法就像查字典,缺点是比较占空间
- (2)仅维护每个行动的直接 前驱/后继
- 这个方法可以取得直接前驱/后继,但是其它节点这需要进行闭包传递计算,才能判断
- 如,查询a3 是不是优先于a2,则开始计算a2的前驱a1,a1的前驱a0,最后a0无前驱,并没有a3,所以不是
- 这种方法运行相对比较慢
- (3)维护 ‹ 关系的传递闭包
- 如 a0 ‹ a1,a0 ‹ a1,a0 ‹ a2,a0 ‹ a3,a1 ‹ a2,a1 ‹ a3,a2 ‹ a3
- 即 a0 ‹ a1 ‹ a2 ‹ a3
- 这种方式比价节省,查询起来也比较快,缺点是,添加新的顺序约束时,要计算一遍和相关的全部闭包关系
- 如增加一个an ‹ a2,则最终会添加 an ‹ a2和an ‹ a3,因为a2传递了下去
使用哪一种表达式需要在空间复杂度和时间复杂度增加做权衡,因为在规划空间中我们使用比较多的是查询,方法(3)的表示是最好的
管理变量绑定约束(miantain binding constraints)
约束的类型
- 一元约束 : x ∈ Dx,我们需要只x的值,并且该值必须属于值域Dx
- 二元约束,我们不需要指定x,y的值,只需要它们满足下面条件
- 等于约束 : x = y
- 不等于约束: x ≠ y
一元约束和等于约束比较简单,可以在线性时间内处理完毕。但是不等于约束则会我们带来很多麻烦,因为不等于约束会带来该类型约束网络的指数复杂性。 因此,CSP问题 (constraint satisfaction problem 约束满足问题)一般是 NP-complete 问题。
PSP 的属性:合理性 与 完整性
最终,PSP算法也有了和状态空间规划一样的属性,即合理性(sound)与完整性(complete),意味着,无论何时,如果初始局部计划 π0可以被完善为一个解决方案,则 PSP(π0) 会返回一个计划,该计划是合理的,完整的。
证明:
- 合理性: 因为在每一步完善的过程中,我们都遵循了顺序约束和变量绑定 约束,因此可以保证其一致性
-
完整性:对解决方案上的行动数进行归纳
下一篇,我们将学习PSP算法的改进版本,POP算法(Partial-Order Planning)