
概述
关于流场寻路算法有许多种称呼,如,力场,向量场,势场。不过都是叫法不一样,其理念都差不多,就是利用网格(当然不局限于网格,也可以抽象为节点和图)来存储目标点到其他所有可达点的向量,该向量可以表示该点到目标点产生的推力。然后,网格上的单位可以根据所在网格产生的推力进行移动。
该算法可以解决RTS或者其他需要对大量单位进行寻路的情况,对比对所有单位进行一次寻路计算,流场算法只需要进行一次计算,就可以将该结果应用于全部单位。
实际情况中,不能因为一次寻路就影响到所有单位,因为这些单位中,有玩家选中的,玩家未选中的,其他正在移动的,敌人的单位等等。因此,根据实际情况和使用场景,需要对该算法做些改进。
下面简单记录一下流场算法的一些核心内容。
主要算法
流场寻路分为三个组成部分:
- 热度图:通过计算网格上所有格子与目标点的路径距离来生成
- 向量场:通过前面的热度图生成向量场,该向量场指定了到达目的的方向
- 自主操控行为:搜索共同目标的所有单位,都通过该向量场来导航到目标点
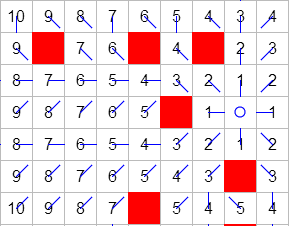
热度图的生成
热度图保存了每个格子到目标点的路径距离。(路径距离和欧几里得距离不同,欧几里得距离是两点间的直接) 可以通过 迪捷斯科拉泛洪算法 ,来生成网格上的数字。
算法主要思路是,从目标点开始,以前后左右四个方向进行递归遍历,和寻路时所使用的有些不同,这里并没有终点,而是洪泛式遍历完整个地图,来填充每个格子到起点的距离。(这里其实可以进行一些优化,只进行局部遍历,不需要把这个地图都遍历完毕,为了简单起见,这里就先不讲这个)
HeatMap.prototype.upadte = function(){
this.openList.length = 0;
this.closeList.length = 0;
var index = G_TargetPoint.x + G_TargetPoint.y * cols;
this.dis[G_TargetPoint.x][G_TargetPoint.y] = 0;
this.openList.push(index);
while (this.openList.length > 0) {
var p = this.openList[0];
this.closeList.push(p);
this.openList = this.openList.slice(1);//从openList删除该节点
var y = int(p / cols);
var x = p - y * cols;
this.GetNeighbor(x,y,this.dis[x][y]);
}
}
HeatMap.prototype.GetNeighbor = function(_x,_y,_value){
var neighbors = [];
neighbors[0] = createVector(_x ,_y - 1);//up
neighbors[1] = createVector(_x + 1,_y);//right
neighbors[2] = createVector(_x ,_y + 1);//down
neighbors[3] = createVector(_x - 1,_y);//left
for (var i = 0; i < neighbors.length; i++) {
var neighbor = neighbors[i];
if(
neighbor.x >= 0 && neighbor.x < cols &&
neighbor.y >= 0 && neighbor.y < rows)
{
if(G_WalkableMap.walkable[neighbor.x][neighbor.y] == 1){//格子可通行
var index = neighbor.x + neighbor.y * cols;
if(!ArrayHas(this.openList,index) && !ArrayHas(this.closeList,index)){
this.openList.push(index);
this.dis[neighbor.x][neighbor.y] = _value + 1;
}
}
}
}
}

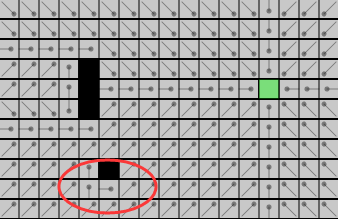
向量图生成
得到热度图后 通过遍历每个方块(不包括不可通行方块),查找它所有的相邻方块(包括斜角),选择抵达目标点路径距离最短的那个,然后把当前网格的向量设置为指向该方块的矢量。
最终生成如图所示的向量场
不过,我们可以进一步对此向量场进行优化,如,不允许其斜着穿过障碍。具体方法是在遍历当前点的8方向邻居时,过滤掉不可通行的,以及斜角方向时,该斜角上一个和下一个邻居。就可以得到如图所示效果
仔细观察可以发现其实是有点缺陷的,当和目标点之间没有任何障碍时,正常情况下它应该直接指向目标点,代理应该直线移动过去比较自然。但是因为我们当前的向量场只支持正交直线以及45度角的直线,类似这种情况的斜线并不支持。《最高指挥官2》中使用视线检测附近是否有更好的路径来实现。
转向力
关于转向力,是由 Craig Reynolds 提出的一种自主操控行为,通过对各种行为定义对环境的感知来产生转向力,继而驱动单位进行运动。文章后面可以找到相关的参考资料。
我们使用流场来驱动单位的运动,因此,我们需要获取单位所在格子上的向量
当我们得到单位所在格子上的向量后,接下来,就可以使用自主操控行为中转向力的概念来移动物体。
Vehicle.prototype.follow = function(_flowfield){
var desired = _flowfield.lookup(this.location).copy();
desired.normalize();
desired.mult(this.maxSpeed);
var steer = desired.sub(this.velocity);
steer.limit(this.maxForce);
return steer;
}
平滑转向力
为了可以沿着向量场进行移动,我们将实现一种操控行为,该行为将为代理的指定其所在格子的方向。为了平滑该矢量,我们使用双线性插值法(Bilinear Interpolation),这样,我们就可以收到最近的四个格子的影响,且最接近的格子的影响最大。
关于双线性插值,简单的描述一下。
就是通过四个已知点。Q11,Q12,Q21,Q22

先求X方向的线性插值,即
- Q11 和 Q21 之间的R1
- Q12 和 Q22 之间的R2
然后求Y方向的线性插值,即通过前面求出的R1 和R2 在y方向上插值计算出P点。
通过该方法可以求出这四个点内任意位置的插值,通常用来对图片像素采样。
利用这个原理,我们对代理当前所在格子周围的格子进行双线性插值。
function steeringBehaviourFlowField(agent) {
//Work out the force to apply to us based on the flow field grid squares we are on.
//we apply bilinear interpolation on the 4 grid squares nearest to us to work out our force.
// http://en.wikipedia.org/wiki/Bilinear_interpolation#Nonlinear
var floor = agent.position.floor(); //把当前位置约束为网格坐标
/*
| 00 | 10 |
| 01 | 11 |
*/
var hasRigth = (x + 1 < cols);
var hasBottom = (y + 1 < rows);
//如果其他格子为空(越界)或者格子不可通行,则取当前格子
var f00 = this.field[x][y];//当前所在格子
var f10 = hasRigth ? this.field[x + 1][y] : f00;
var f01 = hasBottom ? this.field[x][y + 1] : f00;
var f11 = (hasRigth && hasBottom) ? this.field[x+1][y + 1] : f00;
//X方向上的采样
var xWeight = agent.position.x - floor.x;
var top = V.lerp(f00,f10,xWeight);
var bottom = V.lerp(f01,f11,xWeight);
//Y方向上的采样
var yWeight = agent.position.y - floor.y;
//最终移动方向
var direction = Vector.lerp(top , bottom , yWeight).normalize();
//当我们在没有矢量的网格中心,就会发生下面情况
if (isNaN(direction.length())) {
return Vector2.zero;
}
//Multiply our direction by speed for our desired speed
var desiredVelocity = direction * agent.maxSpeed;
//The velocity change we want
var velocityChange = desiredVelocity - agent.velocity;
//Convert to a force
return velocityChange * (agent.maxForce / agent.maxSpeed);
}
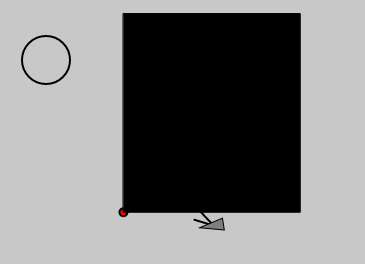
绕开墙
关于障碍的规避比较容易理解。如图,向单位前方投射一个射线(也可以像图中投射一个矩形),当检测到前方有障碍时,会产生一个转向力使得单位偏移原来的运动轨迹。简单方法是获取该物体到射线的法向量,然后取反。

可以查看转向理论的作者的一些文章,里面还提到了许多有趣的行为,例如,沿着路径移动,沿着墙移动。基于这些思想,我们也可以实现自己的转向行为。如,绕开墙!
下面,就介绍如何怎么实现。
墙的法向量。
我们假设墙的有四个顶点:v0,v1,v2,v3。单位的视线 LineOfSight = unit.forward - unit.location;
从线段相交:维基百科这里我们可以拿到线段相交的判断公式,我们就不进行推到,直接使用,主要有两个参数来判定,t 是交点在第一个线段上位置,u 是交点在第二个线段上的位置。它们的取值范围都为[0,1]。
然后将墙的每条边依次和单位的视线进行相交检测
function CrossPoint(_p1,_p2,_p3,_p4){
const x1 = _p1.x;
const y1 = _p1.y;
const x2 = _p2.x;
const y2 = _p2.y;
const x3 =_p3.x;
const y3 = _p3.y;
const x4 = _p4.x;
const y4 = _p4.y;
const den = (x1-x2) * (y3-y4) - (y1-y2) * (x3-x4);
//分母为0,表示两线段不相交,即平行
if(den == 0){
return null;
}
const t = ((x1 - x3) * (y3 - y4) - (y1 - y3) * (x3 - x4)) / den;// 如果 0 <= t <= 1.0,表示交点落在第一个线段内
const u = -((x1 - x2) * (y1 - y3) - (y1 - y2) * (x1 - x3)) / den;//如果 0 <= u <= 1.0 ,表示交点落在第二个线段内
if(t > 0 && t < 1 && u > 0 && u < 1){
const pt = createVector();
pt.x = x1 + t * (x2 - x1);
pt.y = y1 + t * (y2 - y1);
return pt;
}else{
return null;
}
}
得到交点后,我们就可以获取墙的法线方向,假设相交的边为 L = V1 - V0,则法线方向为 N = new Vector(-L.y,L.x),即简单的将边的方向的XY调换后,然后随便取反一个,具体是哪一个可以自己进行测试,和边的方向有关。
接下来就是根据 t 或 u 来获取交点在线段的位置,假设我们把墙的边作为第一个线段输入,那么我们就使用t来判断,如果t > 0.5 ,则与单位前进方向的端点为 V1 ,否则为 V0。
var f_dir =p5.Vector.sub(_location,_forward).normalize();
var lineDir = p5.Vector.sub(v1,v0).normalize();
var dot = p5.Vector.dot(f_dir,lineDir);
if(dot > 0){
conner = v0;
}else{
conner = v1;
}
如图
最终我们得到了两个力,一个是墙的反向推力,另一个是沿着墙的边缘的拉力.把这些力作用到单位上,可以得到不错的效果
抵达行为
普通的抵达行为
Vehicle.prototype.arrive = function(_targetPos){
var desired = _targetPos.sub(this.location);
var distance = desired.mag();
if(distance < 100){
var m = map(distance,0,100,0,this.maxSpeed);
desired.setMag(m);
}else{
desired.setMag(this.maxSpeed);
}
var steer = desired.sub(this.velocity);
steer.limit(this.maxForce);
return steer;
}
流场中的抵达行为
Vehicle.prototype.FlowFieldArrive = function(_flowfield){
//var desired = _flowfield.lookup(this.location).copy();//直接获取所在格子上的向量
var desired = _flowfield.lookup_smooth(this.location).copy();//采用双向性采样获取向量
desired.normalize();
var targetPos = G_TargetPoint.copy().add(0.5,0.5).mult(resolution);
var distance = targetPos.sub(this.location).mag();
if(distance < 100){
var m = map(distance,0,100,0,this.maxSpeed);
desired.setMag(m);
}else{
desired.setMag(this.maxSpeed);
}
var steer = desired.sub(this.velocity);
steer.limit(this.maxForce);
return steer;
}
【参考】