
算法介绍
JPS算法是基于A*算法的扩展实现,也就是说,我们还是会使用到A*的启发方式来挑选下一个扩展节点,只不过,JPS会对候选的扩展节点进行裁剪。例如下面两张图。x 表示当前检测的节点,箭头表示它的前继方向(即它是从哪一个节点来的)。灰色的地方表示将会裁剪掉的邻居节点,白色的地方才是需要的扩展节点。
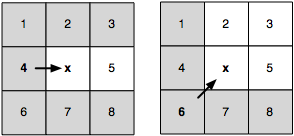
也就是说,上图左边的进行裁剪后,实际上只剩下5号节点,右图裁剪后实际只剩下2,3,5号节点。我们简单起见,现在只是介绍了向右和向右上扩展时的情况(另外6 个方向其实道理一样)。
另外,需要注意强制邻居节点。
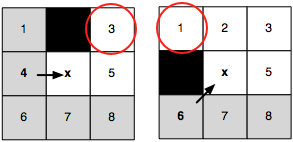 当x沿着箭头方向进行扩展时,当x和障碍物相邻时,图中被圈起来的节点无法被裁剪,该节点也被称为强制邻居节点。
当x沿着箭头方向进行扩展时,当x和障碍物相邻时,图中被圈起来的节点无法被裁剪,该节点也被称为强制邻居节点。
为什么叫做强制邻居节点?因为他会强制结束本次跳跃的进行。例如,节点x一直在朝着右边进行扩展,突然遇到一个障碍出现在它的上面(出现在下面的情况时,强制邻居为8),此时我们会结束跳跃,把当前x节点和强制邻居节点压入OpenSet。这样一来,我们就直接略过中间大部分节点的扩展搜索,并直接从新压入的跳点开始搜索。
其实,以上就算JPS的核心思想,下面我们就基于A*算法对其进行改造,将我们的GeiNeighbors方法进行修改,不在时获取8个方向的邻居,而是经过裁剪后的邻居。
A*搜索
function Search(){
if(done){
return;
}
//执行搜索中
var lowest_id = 0;
var lowest_f = openSet[lowest_id].f;
for (var i = 1; i < openSet.length; i++) {
if(openSet[i].f < lowest_f){
lowest_id = i;
lowest_f = openSet[i].f;
}
}
var current = openSet[lowest_id];
RemoveFormArray(openSet,current);
closedSet.push(current);
if(current == end){
done = true;
console.log("Done!");
return;
}
if(current.cameFrom != null){
//取得移动方向
var dir_x = constrain(current.x - current.cameFrom.x ,-1,1);
var dir_y = constrain(current.y - current.cameFrom.y ,-1,1);
GetNeighbors_WithCut(current,dir_x,dir_y);
}else{
GetNeighbors(current);
}
for (var i = 0; i < neighbors.length ; i++) {
var neighbor = neighbors[i];
var jumpNode = jump(neighbor,current,grid);
if(jumpNode != null && !closedSet.includes(jumpNode)){
var g_score = current.g + floor( dist(jumpNode.x,jumpNode.y,current.x,current.y) * 10) / 10;
if(openSet.includes(jumpNode)){
if(g_score < jumpNode.g){
jumpNode.g = g_score;//是一个更加近的节点
jumpNode.cameFrom = current;
}
}else{
jumpNode.g = g_score;
jumpNode.cameFrom = current;
openSet.push(jumpNode);
}
jumpNode.h = Heuristic(jumpNode,end) ;
jumpNode.f = jumpNode.g + jumpNode.h;
}
}
}
function Heuristic(_spot,_end){
return abs(_spot.x - _end.x) + abs(_spot.y - _end.y) ;
}
获取邻居
function GetNeighbors(_spot){
neighbors.length = 0;
for (var i = 0; i < 8; i++) {
var dir = grid.drections[i];
var neighbor = grid.getNeighbor(_spot,dir.x,dir.y);
if(neighbor != null && neighbor.cost != 0){
if((i % 2) != 0){//对角
var last_dir = grid.drections[(i - 1) % 8];
var next_dir = grid.drections[(i + 1) % 8];
var last = grid.getNeighbor(_spot,last_dir.x,last_dir.y);
var next = grid.getNeighbor(_spot,next_dir.x,next_dir.y);
if(last != null && last.cost == 0 && next != null && next.cost == 0){
console.log("对角");
}else{
neighbors.push(neighbor);
}
}else{
neighbors.push(neighbor);
}
}
}
}
function GetNeighbors_WithCut(_spot,_dirx,_diry){
neighbors.length = 0;
if(_dirx != 0 && _diry != 0){
//斜角
neighbors = DiagonalTest(grid,_spot,_dirx,_diry);
}else{
//非斜角
if(_dirx != 0){
neighbors = HorizontalTest(grid,_spot,_dirx);
}else{
neighbors = VerticalTest(grid,_spot,_diry);
}
}
}
裁剪
function AddForceNeighbor(_cell,_grid,list,_dirx,_diry){
var forceNeighbor = _grid.getNeighbor(_cell,_dirx,_diry);
if(forceNeighbor != null && forceNeighbor.cost != 0){
list.push(forceNeighbor);
}
}
function HorizontalTest(_grid,_currentCell,_dir){
var res = [];
var nextCell = _grid.getNeighbor(_currentCell,_dir,0);
if(nextCell == null){
return res;
}else{
if(nextCell.cost != 0){
res.push(nextCell);
}
}
var upCell = _grid.getNeighbor(_currentCell,0,-1);
var downCell = _grid.getNeighbor(_currentCell,0,1);
//发现强制邻居节点
if(upCell != null){
if(_dir == 1){
AddForceNeighbor_D(_currentCell,_grid,res,0,2,1);
}else{
AddForceNeighbor_D(_currentCell,_grid,res,0,6,7);
}
}
if(downCell != null ){
if(_dir == 1){
AddForceNeighbor_D(_currentCell,_grid,res,4,2,3);
}else{
AddForceNeighbor_D(_currentCell,_grid,res,4,6,5);
}
}
return res;
}
function VerticalTest(_grid,_currentCell,_dir){
var res = [];
var nextCell = _grid.getNeighbor(_currentCell,0,_dir);
if(nextCell == null){
return res;
}else{
if(nextCell.cost != 0){
res.push(nextCell);
}
}
var leftCell = _grid.getNeighbor(_currentCell,-1,0);
var rightCell = _grid.getNeighbor(_currentCell,1,0);
//发现强制邻居节点
if(leftCell != null){
if(_dir == 1){
AddForceNeighbor_D(_currentCell,_grid,res,6,4,5);
}else{
AddForceNeighbor_D(_currentCell,_grid,res,6,0,7);
}
}
if(rightCell != null){
if(_dir == 1){
AddForceNeighbor_D(_currentCell,_grid,res,2,4,3);
}else{
AddForceNeighbor_D(_currentCell,_grid,res,2,0,1);
}
}
return res;
}
function DiagonalTest(_grid,_currentCell,_dirx,_diry){
var res = [];
var nextCell = _grid.getNeighbor(_currentCell,_dirx,_diry);
var nextVCell = _grid.getNeighbor(_currentCell,0,_diry);//垂直方向
var nextHCell = _grid.getNeighbor(_currentCell,_dirx,0);//水平方向
if(nextVCell != null && nextVCell.cost != 0){
res.push(nextVCell);
}
if(nextHCell != null && nextHCell.cost != 0){
res.push(nextHCell);
}
if(nextVCell != null && nextVCell.cost == 0 &&
nextHCell != null && nextHCell.cost == 0){
//不允许穿过两个不可通行的节点之间
return res;
}else{
if(nextCell != null && nextCell.cost != 0){
res.push(nextCell);
}
}
//发现强制邻居节点
if(_dirx == 1 && _diry == -1){
//右上
AddForceNeighbor_D(_currentCell,_grid,res,6,0,7);
AddForceNeighbor_D(_currentCell,_grid,res,4,2,3);
}else if(_dirx == 1 && _diry == 1){
//右下
AddForceNeighbor_D(_currentCell,_grid,res,0,2,1);
AddForceNeighbor_D(_currentCell,_grid,res,6,4,5);
}else if(_dirx == -1 && _diry == 1){
//左下
AddForceNeighbor_D(_currentCell,_grid,res,0,6,7);
AddForceNeighbor_D(_currentCell,_grid,res,2,4,3);
}else{
AddForceNeighbor_D(_currentCell,_grid,res,2,0,1);
AddForceNeighbor_D(_currentCell,_grid,res,4,6,5);
}
return res;
}
//考虑斜角,不需从两个墙之间穿过
function AddForceNeighbor_D(_cell,_grid,list,_close,_open,_add){
var closeCell = _grid.getNeighbor_byDirID(_cell,_close);
var openCell = _grid.getNeighbor_byDirID(_cell,_open);
if(openCell == null)
return;
if(closeCell.cost == 0 &&
openCell.cost != 0){
var dir = _grid.drections[_add];
AddForceNeighbor(_cell,_grid,list,dir.x,dir.y);
}
}
跳跃
function jump(_neighbor,_current,_grid){
if(_neighbor == null || _neighbor.cost == 0){
return null;
}
if(_neighbor == end){
return _neighbor;
}
var dx = _neighbor.x - _current.x;
var dy = _neighbor.y - _current.y;
var forceNeighbor1 = null;
var obstacle1 = null;
var forceNeighbor2 = null;
var obstacle2 = null;
if((dx & dy) != 0){
//斜角
forceNeighbor1 = _grid.getNeighbor(_neighbor,-dx,dy);
obstacle1 = _grid.getNeighbor(_neighbor,-dx,0);
forceNeighbor2 = _grid.getNeighbor(_neighbor,dx,-dy);
obstacle2 = _grid.getNeighbor(_neighbor,0,-dy);
if(HasForceNeighbor(forceNeighbor1,obstacle1,forceNeighbor2,obstacle2)){
return _neighbor;
}
if(jump(_grid.getNeighbor(_neighbor,dx,0) ,_neighbor,_grid) != null ||
jump(_grid.getNeighbor(_neighbor,0,dy) ,_neighbor,_grid) != null){
return _neighbor;
}
}else{
if(dx != 0){
forceNeighbor1 = _grid.getNeighbor(_neighbor,dx,1);
obstacle1 = _grid.getNeighbor(_neighbor,0,1);
forceNeighbor2 = _grid.getNeighbor(_neighbor,dx,-1);
obstacle2 = _grid.getNeighbor(_neighbor,0,-1);
}else if(dy != 0){
forceNeighbor1 = _grid.getNeighbor(_neighbor,-1,dy);
obstacle1 = _grid.getNeighbor(_neighbor,-1,0);
forceNeighbor2 = _grid.getNeighbor(_neighbor,1,dy);
obstacle2 = _grid.getNeighbor(_neighbor,1,0);
}
if(HasForceNeighbor(forceNeighbor1,obstacle1,forceNeighbor2,obstacle2)){
return _neighbor;
}
}
var H_cell = _grid.getNeighbor(_neighbor,dx,0);
var V_cell = _grid.getNeighbor(_neighbor,0,dy);
if((H_cell != null && H_cell.cost != 0) || (V_cell != null && V_cell.cost != 0)){
var D_Cell = _grid.getNeighbor(_neighbor,dx,dy);
return jump(D_Cell,_neighbor,_grid);
}else{
return null;
}
}
function HasForceNeighbor(forceNeighbor1 ,obstacle1,forceNeighbor2,obstacle2){
if((obstacle1 != null && obstacle1.cost == 0 &&
forceNeighbor1 != null && forceNeighbor1.cost != 0) ||
(obstacle2 != null && obstacle2.cost == 0 &&
forceNeighbor2 != null && forceNeighbor2.cost != 0)){
return true;
}
}
学习总结
参考文献