
既然是要做一个通用的AI规划器,那么对于大多数的问题应该都可以给出一个合理的解决方案,因此,为了测试目前的HTN规划器是否可以满足,看看还有什么需要改进的地方,准备了几个例子来进行测试。第一个是前面的过河问题,第二个是华容道小游戏,第三个是模拟人生,第三个是小队战略决策。我们将一个个进行测试,并且不断改进规划器。
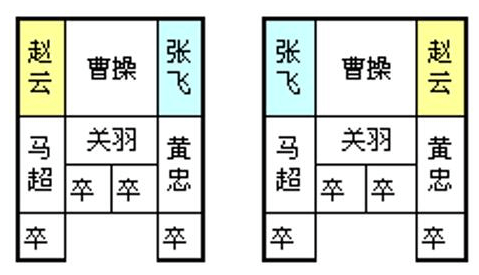
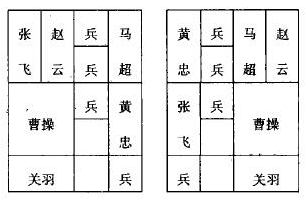
华容道
果然,在实现的过程发现了一些不足,在我们应用行动效果的时候,简单的情况我们可以和以前一样直接写在Effects列表上,如
action.Effects = {
preoperties = {
Substitute("[b].position.x = [b].position.x + x",env),
Substitute("[b].position.y = [b].position.y + y",env)
}
}
但是,如果是复杂点的情况,如,我们想要,把分之前块所在位置上的标志位清空,然后关系分块移动后的标志位,因为方块的形状有多种,不同形状的分块所占位置都不一样,写在效果中的清空逻辑会比较难看。
因此,我们为世界状态添加新的成员,Utils,在里面编写辅助函数。然后在效果中调用该函数即可。
另外,在这个例子的测试中,得益于低估了这个问题的规模,发现了许多隐患,如之前使用table打印的字符串的秘钥做key,以为万无一失,谁知道漏了一个情况。就算是同一张表,打印出来的字符串也有可能是不一样的(因为lua内部实现导致),因此,除非是序列,否则不能相信每次的表打印的内容一样,因此,对于世界状态的保存要用序列来保存。调试了好久才发现是这个问题的锅。
下面是经过调试后成功输出解决方案的例子。不过,这并没有使用什么算法,而是简单的告诉它,任务目标是把曹操移动到门口,可以执行的操作只有对每个方块进行上下左右的移动,因此,它只会暴力去尝试所有可能的操作,并且记录每个操作到至的结果,以此来避免出现重复状态。
运行后知道这个问题规模的可怕了,不过还好可以得到答案。不过花的时间有点长,64秒左右,然后是499步。
找了一些简单的优化办法。 (1)同质
如,对于形状相同的单位都统一看待,就算是它们位置对调也相当于相同的世界状态。
改完之后,卧槽,
- 关闭启发函数 9秒,99步
- 启用启发函数 3秒,57步
启发算法是,优先移动曹操,并且上下左右移动时,尽量选择越靠近出口的操作。然后其它单位则是优先选择远离出口的操作。
(2)对称
对于任意对称的状态来说,它们的走法也都一样,因此,求解华容道问题时,可以将对称的状态视为相同的状态,从而直接减少一半的问题规模。
每添加一个状态表时,把状态表左右镜像也加入状态列表。
local t = {}
for y=1,#self.Objects[1].flags do
t[y] = {}
local list = self.Objects[1].flags[y]
for x=1,#list do
t[y][x] = list[#list + 1 - x]
end
end
return {t}
不过因为使用了表的打印字符串和哈希加密算法,检测左右对称后反而让加长了时间,变成4.7秒。因此,过于如何描述世界状态,以及保存出现过的状态这部分还有待改进。
参考链接
Test
--====
--测试脚本
--====
package.path = package.path .. ";../?.lua"
require "HTN.Core.LocalParser"
require "HTN.Utils.SubstituteUtility"
require "HTN.Utils.LogUtil"
local methods = require 'HTN.Core.HRD.Methods'
local worldstates = require 'HTN.Core.HRD.WorldStates'
local tasks = require "HTN.Core.HRD.Tasks"
local actions = require "HTN.Core.HRD.Actions"
local planner = require "HTN.Core.Planner"
local planRunner = require "HTN.Core.PlanRunner"
local heuristic = require "HTN.Core.Heuristic"
worldstates:InitGrid()
--table.print(worldstates.Objects)
---[[
local plan = planner:TryGetSolution(worldstates,"GetOut()",tasks,actions,methods,heuristic)
--print(plan)
if plan == nil then
print("plan == nil")
else
--table.print(plan)
PrintWorldState(worldstates,0)
print("解决方案步数",#plan)
planRunner:DoPlan(worldstates,plan)
end
WorldStates
--========================
-- WorldStates.lua
--========================
---------------------------------------------------------------------
-- Yimi_HTNs (C) CompanyName, All Rights Reserved
-- Created by: AuthorName
-- Date: 2019-12-05 13:05:58
---------------------------------------------------------------------
-- 约定某个单位的坐标为左下角
-- 坐标原点为左上角
-- 出口位置为(2,5)
---@class WorldStates
local WorldStates = {}
WorldStates.Objects = {
{
name = 'A',
type = 4,
position = {x = 2,y = 2},
size = {x = 2,y = 2},
preference = 0
},
{
name = 'B',
type = 3,
position = {x = 1,y = 3},
size = {x = 2,y = 1},
preference = 2
},
{
name = 'C',
type = 3,
position = {x = 1,y = 4},
size = {x = 2,y = 1},
preference = 2
},
{
name = 'D',
type = 3,
position = {x = 1,y = 5},
size = {x = 2,y = 1},
preference = 2
},
{
name = 'E',
type = 3,
position = {x = 3,y = 3},
size = {x = 2,y = 1},
preference = 2
},
{
name = 'F',
type = 3,
position = {x = 3,y = 4},
size = {x = 2,y = 1},
preference = 2
},
{
name = 'G',
type = 1,
position = {x = 1,y = 1},
size = {x = 1,y = 1},
preference = 1
},
{
name = 'H',
type = 1,
position = {x = 1,y = 2},
size = {x = 1,y = 1},
preference = 1
},
{
name = 'I',
type = 1,
position = {x = 3,y = 5},
size = {x = 1,y = 1},
preference = 1
},
{
name = 'J',
type = 1,
position = {x = 4,y = 5},
size = {x = 1,y = 1},
preference = 1
}
}
WorldStates.Utils = {
UpdateFlags = function(_Grid,_tile,_Flags)
for x = 1, _tile.size.x do
for y = 1, _tile.size.y do
local col = _tile.position.x + x - 1
local row = _tile.position.y - (y - 1)
_Grid.flags[row][col] = _Flags
end
end
end,
IsCanHorizontalMove = function(_Grid,_t,_dir)
local IsEmpty = function(_x,_y)
if _x < 1 or _x > 4 or _y < 1 or _y > 5 then
return false
else
return _Grid.flags[_y][_x] == 0
end
end
for i = 1, _t.size.y do
local px = 0
local py = _t.position.y - (i - 1)
if _dir > 0 then
-- 测试右边会不会出界
px = _t.position.x + (_t.size.x - 1) + _dir
else
-- 测试左边会不会出界
px = _t.position.x + _dir
end
if not IsEmpty(px,py) then
return false
end
end
return true
end,
IsCanVertialMove = function(_Grid,_t,_dir)
local IsEmpty = function(_x,_y)
if _x < 1 or _x > 4 or _y < 1 or _y > 5 then
return false
else
return _Grid.flags[_y][_x] == 0
end
end
for i = 1, _t.size.x do
local px = _t.position.x + (i - 1)
local py = 0
if _dir < 0 then
-- 测试上边会不会出界
py = _t.position.y - (_t.size.y - 1) + _dir
else
-- 测试下边会不会出界
py = _t.position.y + _dir
end
if not IsEmpty(px,py) then
return false
end
end
return true
end,
TilePreference = function(_tile)
local dis = math.abs (_tile.position.x - 2 + _tile.position.y - 5)
return dis + _tile.preference
end,
DistanceFromGate = function(_tile,_x,_y)
local dis = math.abs(_tile.position.x + _x - 2 + _tile.position.y + _y - 5)
if(_tile.type == 4) then
return dis
else
return 100 - dis
end
end
}
function PrintWorldState(_ws,_depth)
print(string.rep("=",_depth*4).."=============================")
print(string.rep(" ",_depth*4)..table.concat(_ws.Objects[1].flags[1],",") )
print(string.rep(" ",_depth*4)..table.concat(_ws.Objects[1].flags[2],",") )
print(string.rep(" ",_depth*4)..table.concat(_ws.Objects[1].flags[3],",") )
print(string.rep(" ",_depth*4)..table.concat(_ws.Objects[1].flags[4],",") )
print(string.rep(" ",_depth*4)..table.concat(_ws.Objects[1].flags[5],",") )
print(string.rep("=",_depth*4).."=============================")
end
function WorldStates:CacheMainData()
return self.Objects[1]
--return table.concat(self.Objects[1].flags[1],",")..
--table.concat(self.Objects[1].flags[2],",")..
--table.concat(self.Objects[1].flags[3],",")..
--table.concat(self.Objects[1].flags[4],",")..
--table.concat(self.Objects[1].flags[5],",")
end
function WorldStates:InitGrid()
local grid = {
name = "Grid",
flags = {
{0,0,0,0},
{0,0,0,0},
{0,0,0,0},
{0,0,0,0},
{0,0,0,0}
}
}
for i, v in ipairs(self.Objects) do
self.Utils.UpdateFlags(grid,v,v.type)
end
table.insert(self.Objects,1,grid)
end
return WorldStates
Tasks
local Tasks = {}
function Tasks:GetTask(_taskdecl)
local name, p = splitFunc( _taskdecl)
local task = self[name](table.unpack(p))
task.taskDecl = _taskdecl
return task
end
Tasks.GetOut = function ( ... )
local input = {...}
local env = setmetatable(
{},
{__index = _G}
)
local task = {}
task.IsPrimitive = false
task.Methods = {
Substitute("MoveTile(A)",env),
Substitute("MoveTile(B)",env),
Substitute("MoveTile(C)",env),
Substitute("MoveTile(D)",env),
Substitute("MoveTile(E)",env),
Substitute("MoveTile(F)",env),
Substitute("MoveTile(G)",env),
Substitute("MoveTile(H)",env),
Substitute("MoveTile(I)",env),
Substitute("MoveTile(J)",env),
Substitute("End()",env)
}
return task
end
Tasks.TestDir = function ( ... )
local input = {...}
local env = setmetatable(
{
t = input[1]
},
{__index = _G}
)
local task = {}
task.IsPrimitive = false
task.Methods = {
Substitute("Move_Vertical_2Step([t],1)",env),--Down
Substitute("Move_Vertical_2Step([t],-1)",env),--Left
Substitute("Move_Vertical_2Step([t],-1)",env),--Up
Substitute("Move_Vertical_2Step([t],1)",env),--Right
Substitute("Move_Vertical_1Step([t],1)",env),--Down
Substitute("Move_Horizontal_1Step([t],1)",env),--Right
Substitute("Move_Vertical_1Step([t],-1)",env),--Up
Substitute("Move_Horizontal_1Step([t],-1)",env)--Left
}
return task
end
Tasks.Move = function ( ... )
local input = {...}
local env = setmetatable(
{
t = input[1],
x = input[2],
y = input[3]
},
{__index = _G}
)
local task = {}
task.IsPrimitive = true
return task
end
return Tasks
Methodes
local Methods = {}
function Methods:GetMethods ( _methoddecl )
local name, p = splitFunc( _methoddecl)
return self[name](table.unpack(p))
end
Methods.UseHeuristic = true
Methods.MoveTile = function(...)
local input = {...}
local env = setmetatable(
{
t = input[1]
},
{__index = _G}
)
local method = {}
method.preconds = {
valuelimits = {
Substitute("not (A.position.x == 2 and A.position.y == 5)",env),
Substitute("IsCanVertialMove(Grid,[t],1) or IsCanVertialMove(Grid,[t],-1) or IsCanHorizontalMove(Grid,[t],1) or IsCanHorizontalMove(Grid,[t],-1)",env)
}
}
method.subtasks = {
Substitute("TestDir([t])",env),
Substitute("GetOut()",env)
}
method.score = Substitute("return TilePreference([t])",env)
return method
end
Methods.Move_Vertical_1Step = function(...)
local input = {...}
local env = setmetatable(
{
t = input[1],
d = input[2]
},
{__index = _G}
)
local method = {}
method.preconds = {
valuelimits = {
Substitute("IsCanVertialMove(Grid,[t],[d])",env)
}
}
method.subtasks = {
Substitute("Move([t],0,[d])",env)
}
method.score = Substitute("return DistanceFromGate([t],0,[d])",env)
return method
end
Methods.Move_Vertical_2Step = function(...)
local input = {...}
local env = setmetatable(
{
t = input[1],
d = input[2]
},
{__index = _G}
)
local method = {}
method.preconds = {
valuelimits = {
Substitute("IsCanVertialMove(Grid,[t],[d])",env),
Substitute("IsCanVertialMove(Grid,[t],[d] * 2)",env)
}
}
method.subtasks = {
Substitute("Move([t],0,[d] * 2)",env)
}
method.score = Substitute("return DistanceFromGate([t],0,[d] * 2)",env)
return method
end
--水平移动
Methods.Move_Horizontal_1Step = function(...)
local input = {...}
local env = setmetatable(
{
t = input[1],
d = input[2]
},
{__index = _G}
)
local method = {}
method.preconds = {
valuelimits = {
Substitute("IsCanHorizontalMove(Grid,[t],[d])",env)
}
}
method.subtasks = {
Substitute("Move([t],[d],0)",env)
}
method.score = Substitute("return DistanceFromGate([t],[d],0)",env)
return method
end
Methods.Move_Horizontal_2Step = function(...)
local input = {...}
local env = setmetatable(
{
t = input[1],
d = input[2]
},
{__index = _G}
)
local method = {}
method.preconds = {
valuelimits = {
Substitute("IsCanHorizontalMove(Grid,[t],[d])",env),
Substitute("IsCanHorizontalMove(Grid,[t],[d] * 2)",env)
}
}
method.subtasks = {
Substitute("Move([t],[d] * 2,0)",env)
}
method.score = Substitute("return DistanceFromGate([t],[d] * 2,0)",env)
return method
end
Methods.End = function(...)
--local input = {...}
local env = setmetatable(
{},
{__index = _G}
)
local method = {}
method.preconds = {
valuelimits = {
Substitute("A.position.x == 2 and A.position.y == 5",env)
}
}
method.score = Substitute("return 0",env)
return method
end
return Methods
Actions
local Actions = {}
function Actions:GetAction(_actiondecl)
local name, p = splitFunc( _actiondecl)
return self[name](table.unpack(p))
end
Actions.Move = function(...)
local input = {...}
local env = setmetatable(
{
t = input[1],
x = input[2],
y = input[3]
},
{__index = _G}
)
local action = {}
action.Effects = {
preoperties = {
Substitute("UpdateFlags(Grid,[t],0)",env),
Substitute("[t].position.x = [t].position.x + [x]",env),
Substitute("[t].position.y = [t].position.y + [y]",env),
Substitute("UpdateFlags(Grid,[t],[t].type)",env)
}
}
function action:Execute(_ws)
-- TODO 实现
self.End()
end
return action
end
return Actions